Auto-Crossing via Joystick manoeuvring control system
Newly developed Auto-crossing system successfully trialed and accepted onboard RO-Pax ferries

The routes consist of waypoints and radiuses of turns, which are pre-loaded inside the system’s memory. The change between the different routes is available manually or via external signals (for example when the vessel changes its direction of the movement).
The system allows simplifying manoeuvring control of the vessels with complicated propulsion configuration. The system combines features manual control of engines and thrusters using the single joystick as well as position and heading keeping in the automated mode.

Auto-crossing modes description
Mode indication |
Mode |
Description |
|
|
Ferry Speed |
Allows setting the exact speed value and calculates the time of vessel arrival to the final point of the route with current set speed. The system automatically keeps the set speed and calculates the time of arrival accordingly |
|
|
Ferry Time |
Allows setting the exact time value that defines when the vessel should arrive in the final point of the route loaded in the system. The system automatically controls the vessel’s speed to reach the last point at set time. |
Manoeuvring in “Ferry Time” mode

Display information
- Set arrival time value by pressing the knob. The system automatically controls the vessel’s speed to arrive at the final waypoint at set time.
- Tilt the joystick in Y direction if you need to go around some obstacle.

- Use the joystick for mooring when the vessel reaches the final waypoint.
Manoeuvring in “Ferry Speed” mode
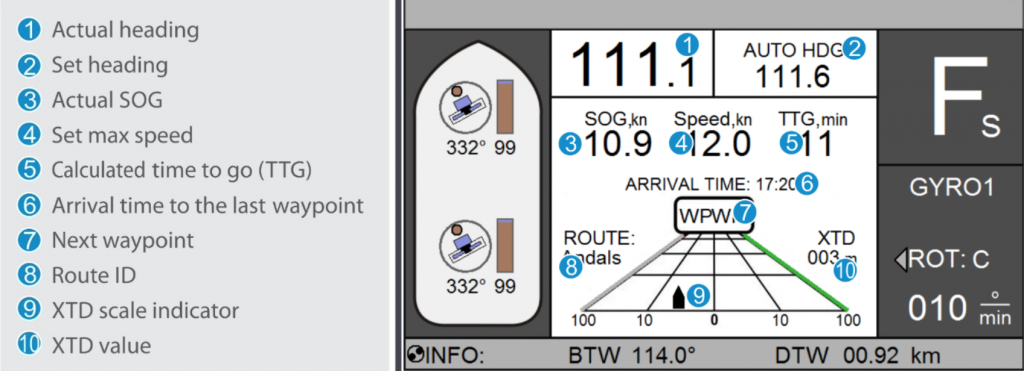
Display information
- Set maximum speed value by rotating and pressing the knob. The system automatically calculates the time of vessel arrival at the final waypoint at current set speed.
- Tilt the joystick in Y direction if you need to go around some obstacle.
- Use the joystick for mooring when the vessel reaches the final waypoint.
Please contact sales@navisincontrol.com for more details.
